Model No. B238
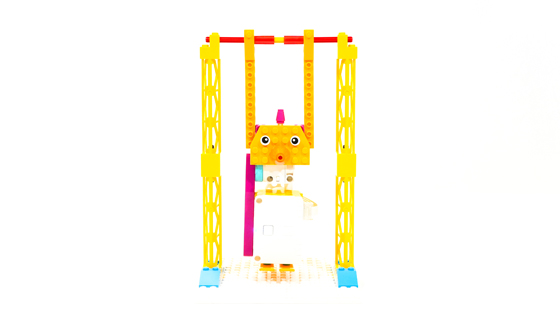
SPIKEベーシックを使った「鉄棒でぶらぶらする鶏」。 最初は加速度の変化で姿勢を制御しようかと考えたが、応答速度的に全然無理なことが判明したため、「振り子の等時性」を利用。