 |
| Model No. A015 | 純白の半神 |
![]()
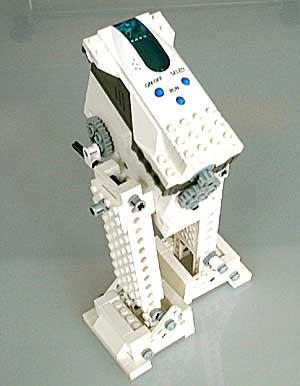
DDKに入っているMicroSCOUTを用いて二足歩行するロボット。
足首を傾けることで、重心を左右に移動し、
片方の足が接地しているとき、もう片方の足が浮き、前へ繰り出される。
MicroSCOUTの1つのモーターで、
両足の前後の往復運動と、各足首の傾きの往復運動を作り出している。
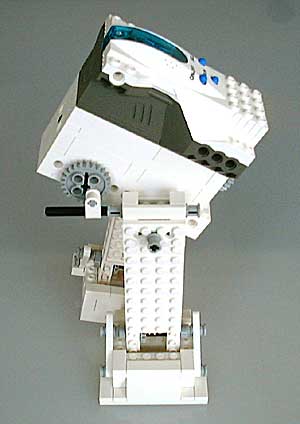
写真中央の手前向きのブッシュの軸が、
足の支点であり、足首に動力を伝える駆動軸である。
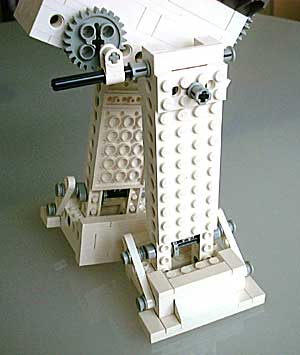
写真では隠れて見えないが、足のまん中、縦方向に駆動軸が入っている。
以下は、歩いているところをQuickTime Movieにしたもの。(約350k:要QuickTime 3.0以上)
![]()
![]()
![]()
![]()
![]()